
-
Description
Valeo AD Simulation Platform has been developed based on three paradigms:
- Simulation Environment The first component of the Platform is the simulation environment software. Simulation software can realistically and precisely model a large variety of vehicles and their dynamic behavior through multi-body vehicle dynamic models. Additionally, they provided a user-friendly scenario and road editor that allow end-users to easily conceive their scenario. Driver modeling can also be tuned to fit as closely as possible to reality. In our platform, we use IPG CarMaker®
- Model-Based Design Specially fit to Control theory, Model-Based Design is used as for conception of the control part of the Automated Driving System. In our case, the tool used for this part is MATLAB/Simulink®
- Middleware Rapid Prototyping – The third pillar of the simulation platform is a tool for rapid prototyping of SW codes to be used with synchronous data coming from sensors (real or simulated). The main advantage of adding those SW Development tools in the platform is mainly because the same code can be tested both on simulation (SIL) and in a real embedded computer on vehicle. In this simulation the middleware used is RTMaps®
All those three types of tools can be communicated through dedicated ad hoc interfaces. For the use of the platform, the chosen exchange protocol is UDP Socket Sender/Receiver concatenated with an in-house encoder/decoder. The main advantage of this low-level protocol is that it enables a high bandwidth exchange rate with no risk of data loss.
Here is a functional and software architecture of the Autonomous Driving Platform.
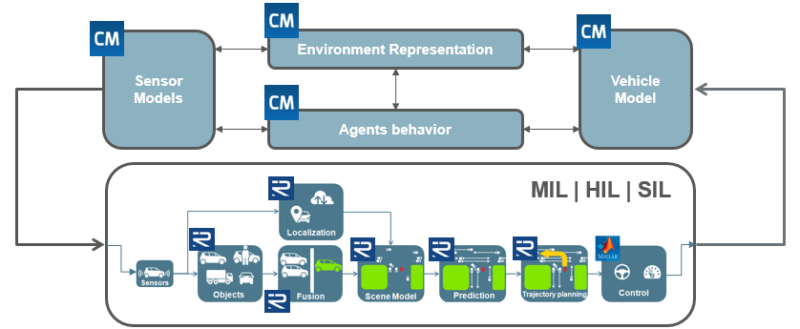
Figure 1: Functional & SW architecture of the Simulation Platform
2. Scenario Database
As a Research & Innovation platform, the AD Simulation Platform is being adapted to be able to use inputs from the MOSAR Scenario Database. (MOSAR is an acronym for Méthodes et Outils pour l’évaluation de la Sûreté de fonctionnement et l’Analyse de la Robustesse des véhicules autonomes, in eng. : “Methods and Tools for the Evaluation of the Dependability and the Analysis of the Robustness of Autonomous Vehicles” ).
MOSAR has mainly three sources of scenario :
- Common and notable scenarios coming from naturalistic driving. This represents more than 100K concrete scenarios.
- Incident scenarios are added by detecting Safety Relevant Event (SRE) and Safety Critical Event (SCE).
- Accident scenarios: In tune with the foreseeable first developments of AD functions, the accidents that occurred on highways and divided roads, involving at least a passenger car or commercial vehicle.
3. Device under test
AD Simulation platform in HEADSTART is deployed to test KET Positioning. The localization system is an in-house positioning system that is based on Scanning LiDAR, the so-called Valeo ScaLa® , to absolutely estimate the position of the EGO-vehicle. Here is a macro description of the input and output of the Localization System.
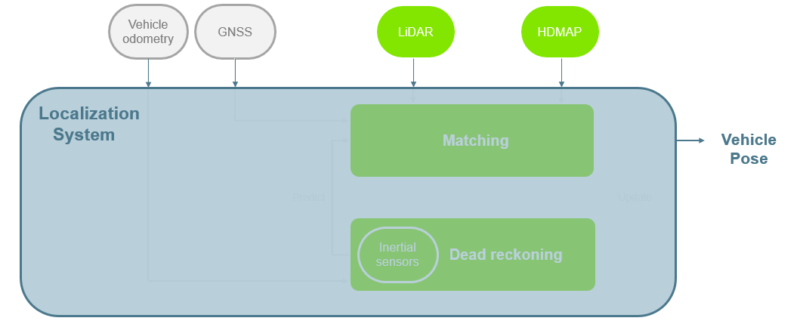
Figure 2: INPUT/OUTPUT of Localization system as Blackbox TESTING
The testing that is carried out in HEADSTART is focusing on monitoring and assess of the localization system:
- Virtual Testing of the model of the Use Case under test (HWP condition, and TJC condition)
- Software in the loop with the SW localization algorithm in the loop based on the selected scenario from the Scenario DB.
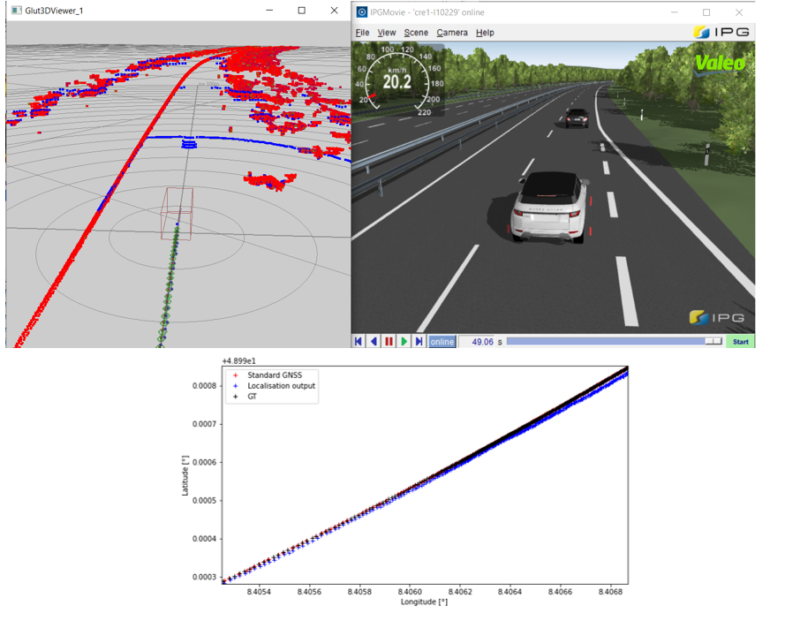
Figure 3: View of the co-simulation of the localization device and output traces
For both testing the goal is actually not to assess the software nor the model under test but only to see how far can HEADSTART methodology be specifically applied to this AD generic Simulation Platform. The output of the KET Localization system will be monitored and compared to ground truth data (This is deeper explained in the HEADSTART delivery) . On the other side, the general behavior of the Model under test (TJC , HWP) will be monitor to see if the model globally comply with general requirements.
4. Conclusion and perspectives
As a conclusion, we can conclude by giving perspectives about the next steps and challenges for Simulation in the Autonomous Driving industry:
- Expand simulation process to be entirely part of the homologation process. This activity is tackled by the experts reunited in the sub-group 2 of the Informal Working Group VMAD of the GRVA.
- Expand simulation process with a correlation activity to define and measure credibility of simulation. "credibility" is used in the sense of the quality to elicit belief or trust in Models and Simulations results.1
- Integrate the whole AD stack into the simulation tool chain combined with Continuous Integration / Continuous Delivery (CI/CD) capacities.
The blog post was created by Keilatt Andriantavison, from Valeo. As Simulation Referent, he has been involved in European projects to help in deploying Simulation for validation and homologation processes and acts as Valeo representative in Euro NCAP Working Group.