
Last January 2021 entered into force the first UN Regulation that covers a SAE level 3 system, or in other words, a system that can drive the vehicle under limited conditions without further confirmation of the driver. Therefore, this makes an important step towards the deployment of connected and automated vehicles, in views of a safer and sustainable mobility.
The intention of the regulation is to define the safety requirements and performance for the approval of vehicles with regards to Automated Lane Keeping Systems (ALKS). The system is able to control the lateral and longitudinal movement of the vehicle for extended periods of time without driver command.
The regulation has been developed under the Framework Document on automated/autonomous vehicles published by the world Forum for Harmonization of Vehicle Regulations in 2019. The document establishes a guideline for the future normative work of the United Nations for the future of mobility and identifies the key principles for the safety and security of automated/autonomous vehicles of level 3 and higher.
The main objective of the Framework is to ensure safety of road users and compliance with road traffic rules. A series of issues is listed as priorities to be addressed by WP.29 for the deployment of these new technologies:
- System Safety;
- Failsafe Response;
- Human Machine Interface;
- Object Event Detection and Response (OEDR);
- Conditions under which the automated system will operate;
- Validation for System Safety;
- Cybersecurity;
- Software Updates;
- Data storage and Event data recorder (EDR).
According to the key topics listed above, different expert groups from UN WP.29 are developing the technical requirements that will pave the way for the new regulations. Some of them (cybersecurity and software updates) are currently in place and entered into force at the beginning of this year.
Currently, the ALKS system has been defined as a system that can be activated in certain conditions and roads where vulnerable road users are prohibited and which by design are equipped with physical separation with the traffic moving in opposite directions. As a first step the system is limited at 60 kph for M1 vehicles, but the relevant working groups are studying the possibility to extend it to the remaining categories (M and N) together with the operational maximum speed.
UN Regulation 157 will be the first regulation that will use a new certification approach. While the safety of conventional systems (braking system for example), is validated through visual inspections and proving ground testing, ALKS will be assessed by using the “multi pillar approach” concept.
The multi pillar approach is a new validation method that validates the system’s safety by following different steps as from the development of the system to its final deployment:
- Audit ;
- Simulation/virtual testing ;
- Proving ground testing ;
- Real-world testing.
All the areas or pillars are connected in a way that results obtained during one of the phases may be used to create a testing scenario for another one to verify or validate the overall safety of the system.
The first step involves the audit of the system, which includes verifying that the manufacturer has considered from the development phase, a process to ensure the functional and operational safety of the automated system. The manufacturer shall declare the safety concept of the system, demonstrating that the system has been developed in such a way that it is free of unreasonable safety risks to the driver or road users under faults and non-faults conditions. Additionally, the Approval Authority or the Technical Service has to evaluate the functional safety validation implemented by the manufacturer, so as to ensure the absence of unreasonable risks under hazards of the electric or electronic systems.
In terms of proving ground testing, the regulation splits the system in several test scenarios that are assessed separately, as can be seen in Figure 1.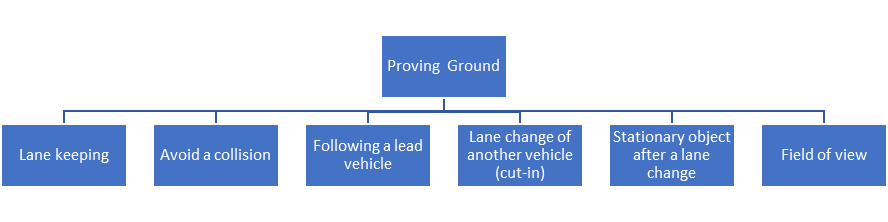
Figure 1. Proving ground test scenarios
Once the previous test scenarios have been successfully passed and the functional safety has been assessed, the final step is to test in real-world conditions. The audit of the system according to the functional safety and the safety concept together with the real-world tests, enable the Technical Services to identify areas of the system that could require further assessment.
Finally, there are also requirements for Human-Machine Interface (HMI), that prevent misunderstanding or misuse by the driver.
The blog post was created by Oriol Flix. Oriol Flix studied Aerospace Vehicles Design from 2009 to 2013. After that he got a master’s degree in Aeronautical Management. From 2016 onwards he has been working as homologation engineer for IDIADA. His expertise area are dynamic systems and active safety, and currently he’s getting more and more involved with autonomous and connected vehicles. During these years he also took part of UNECE task force groups for the development of technical requirements for Cybersecurity, Software Updates and AEBS for heavy-duty vehicle regulations.